Introduction
These tutorials will be focused on Robot Perception stack like Image Processing, Photogrammetry and Computer Vision being focused on applications in the field of robotics. A camera interfacing section would be included to deal with specific devices like Depth cameras, Pi-cameras, USB cameras. Apart from that we will be focusing on problem specific algorithms and their implementations.
The idea of Robot Perception revolves around the question of “What is Where?”. For example: You want to pickup a blue ball. So, at first you need to perceive your surrounding i.e. “What does surrounding look like?”” As per now, we can say surrouding consists of different colored balls. Then, we need to know the location of those balls in our real 3D world i.e. “Where are the balls located?”” The location is 3D coordinate with respect to a reference frame. Finally, we can complete our task to pickup a blue ball.
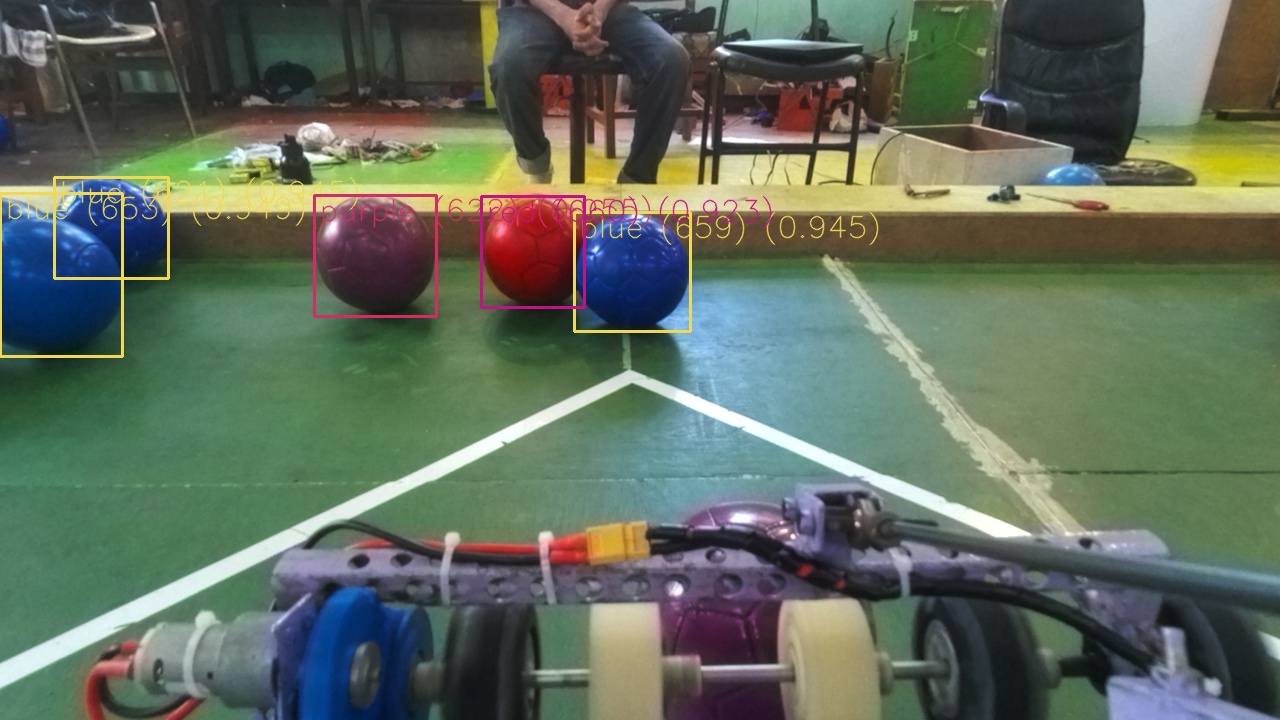 RGB image of surrounding
RGB image of surrounding
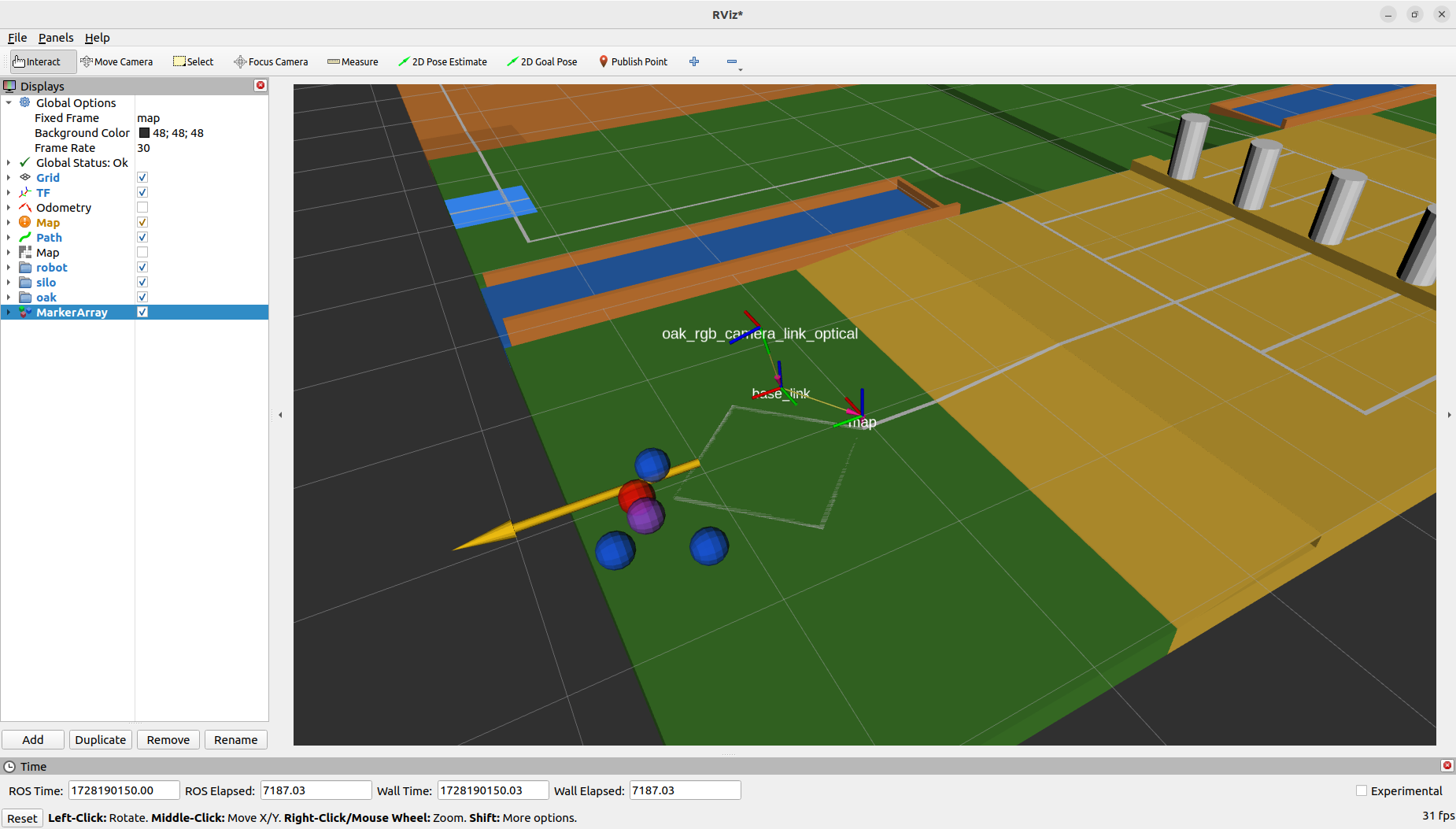 Robot's understanding of its surrounding
Robot's understanding of its surrounding
Robot Perception Introduction