ABU Robocon - 2024, Vietnam
Official Competition Theme Link to heading
Details about the Event Link to heading
About Project Link to heading
Our team from Robotics Club Pulchowk represented our nation Nepal in the competition by making a manual robot and an automatic robot based on the team and provided criteria. We worked for about 10 months from Oct. 2023 - Jul. 2024 and won Tokyo Electron Award.
Contributions Made Link to heading
I designed the perception pipeline for the autonomous robot using depth and monocular cameras. I fine-tuned YOLOv8 model for object detection and analysis of game field. Based on the perceived state of the environment, the robot needed to perform its tasks – quickly pick up the team-colored ball (Task-1) and quickly store the picked ball into the optimal storage vessel (Task-2).
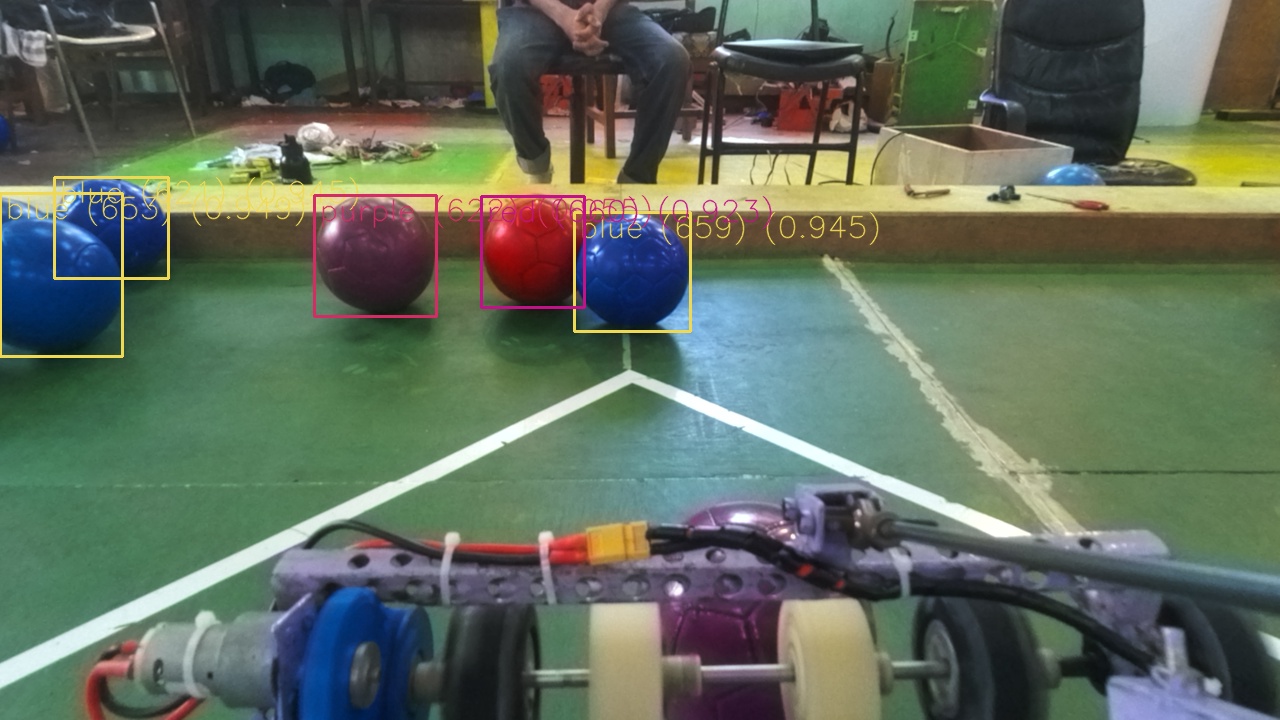
Area 3 - Front Camera Feed (OAKD Pro-W Depth Camera)
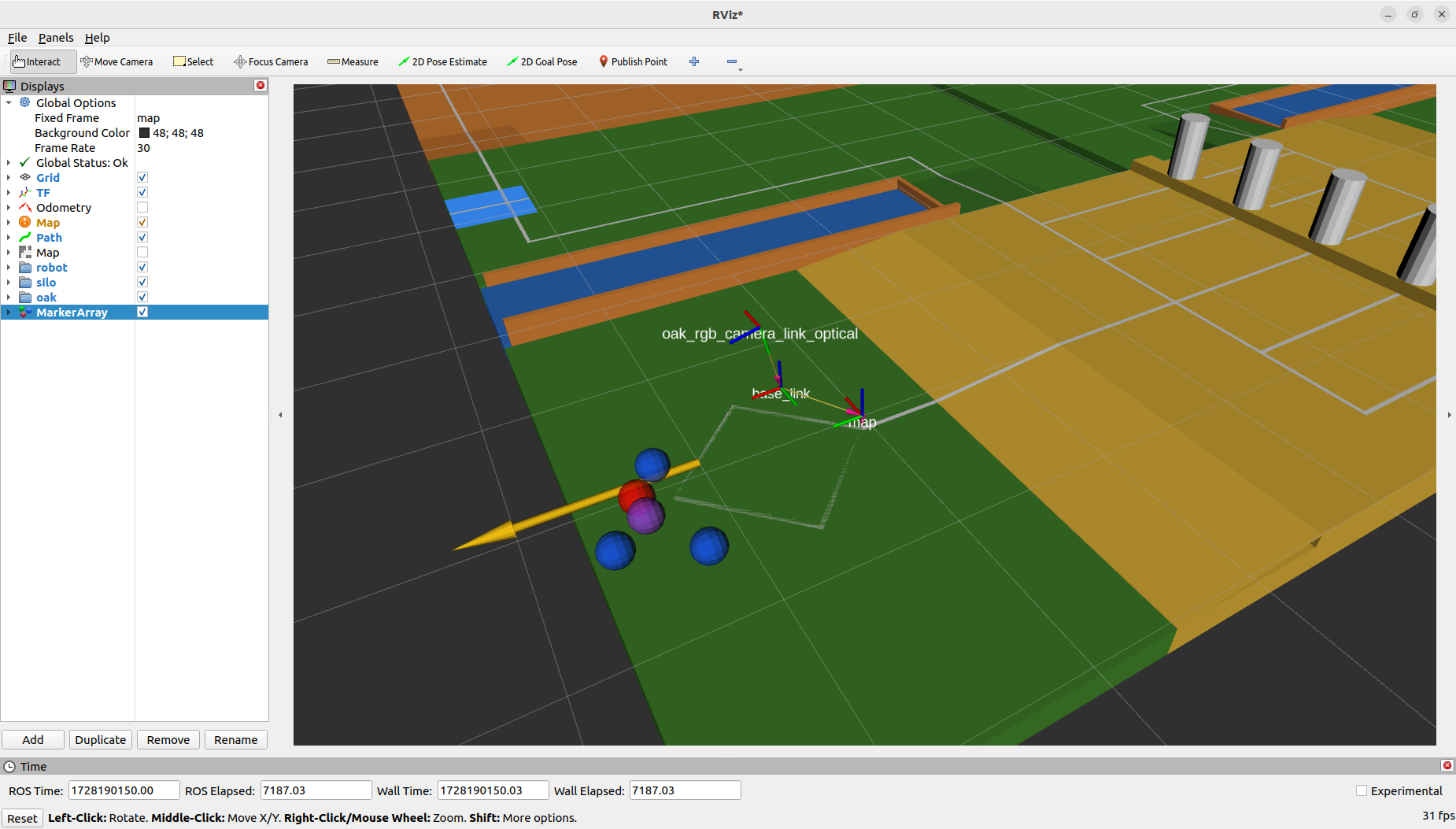
Robot's Perception of Area 3

Area 3 - Back Camera Feed (Picamera v3 Wide)
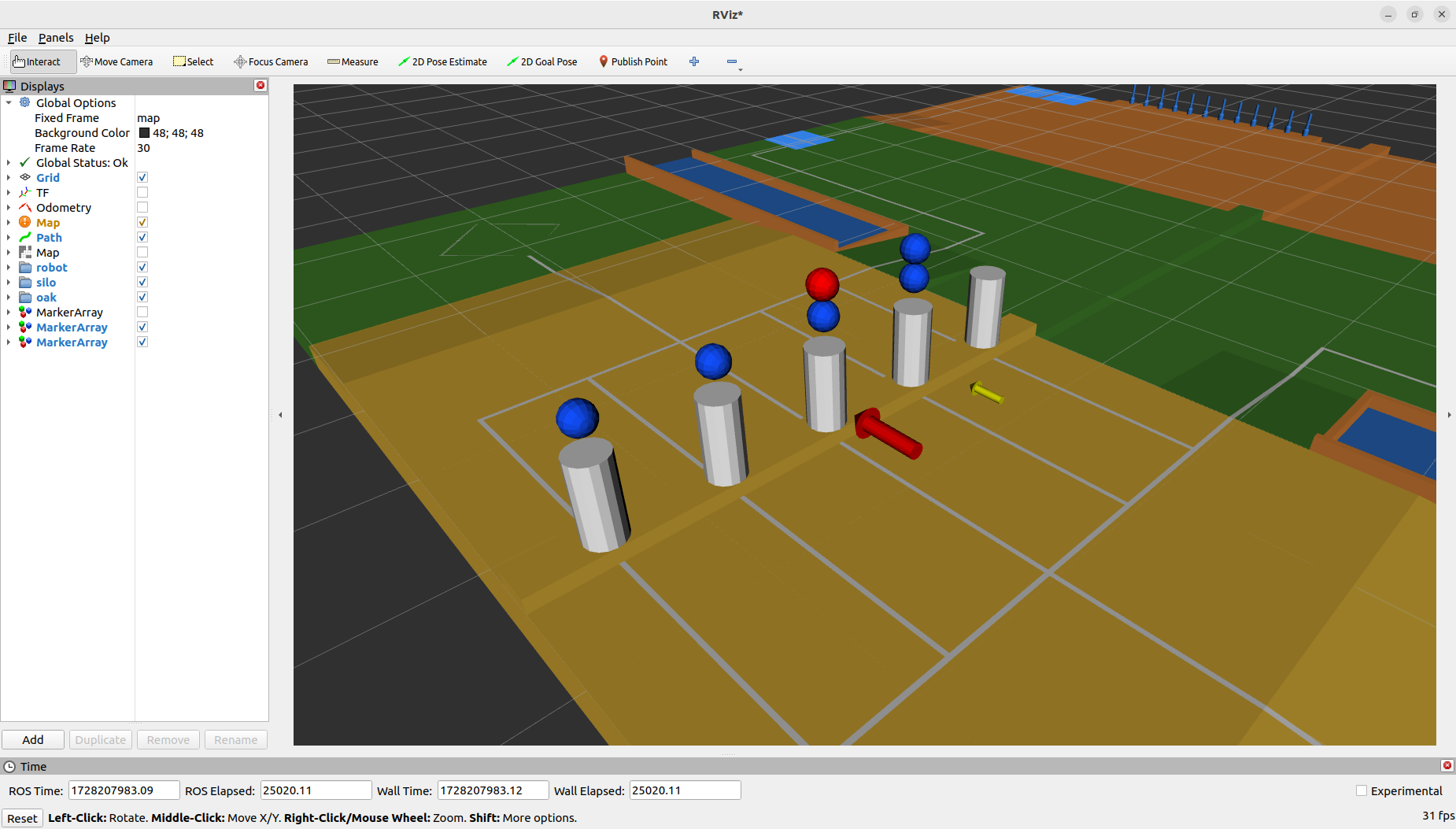
Robot's Perception of Storage Vessels